
1、蜘蛛“飞”的过程是怎样的?
科学家将蜘蛛“飞”的这一行为称为“飞航(ballooning)”,属于种群扩散中的远距离扩散。飞航包括“起飞、空中航行、降落”三个步骤。
蜘蛛不能直接从地上飞到空中,需要到达高处(树枝或草丛)进行预飞航。对于新蛛下目来说,预飞航有两种形式:一、脚尖式。即蜘蛛先爬到高处,选好位置,步足伸展,尾部抬起并释放蛛丝(图a一列);二、漂筏式。在蜘蛛爬到高处后,使用蛛丝下降到一定高度,然后再次释放蛛丝,进而实现飞行(图e一列)。还有一些原蛛下目的类群采用另一种漂筏式,区别在于起飞时不释放蛛丝。
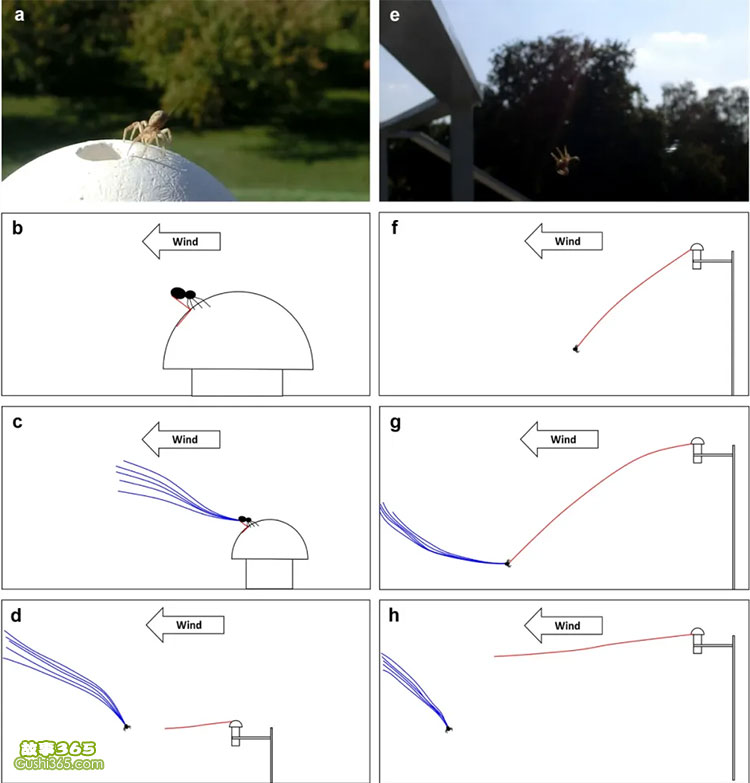
红蓝色线都表示蛛丝,红色蛛丝主要起到固定蜘蛛的作用,蓝色蛛丝则参与飞航过程
目前,对于空中航行和降落两个环节还鲜有报道。
有学者指出,如果天气条件适宜,则蜘蛛启动飞航,且能够在6小时内飞航30km;如果考虑连续飞航,水平方向上能够达到3200km,垂直方向上能够到达5km。甚至在大气平流层也发现过飞航蜘蛛。飞航蜘蛛能利用不同长度的蛛丝实现对飞航距离和降落点的控制,然而,有学者认为“飞航者是否能实现对飞航过程的有效控制”仍然是不清楚的,因为大气环境条件是不可预测的。有学者更进一步指出,在混乱气流中飞航者对扩散距离的控制力较弱。
到底是什么原因促使了飞航的终止,目前也缺乏证据。有报道称蜘蛛对飞航的落点无法进行选择,但也有学者持不同观点,如Tolbert发现,当降落点环境状况不理想时,蜘蛛会再次飞航,直至到达合适位点,某些情况下,蜘蛛甚至可以连续飞航超过6次。
2、蜘蛛是怎样“飞”起来的?
目前普遍存在两种观点,即空气动力理论和大气静电理论。
一、空气动力理论
空气动力理论的基本观点是:蜘蛛在一条或数条蛛丝的牵引下,能够在上升气流的作用下向上运动。该理论认为空气对流是蜘蛛起飞的主要驱动力。从20世纪中期开始,这一理论逐渐受到重视,学者们发表了大量文章解释蜘蛛飞航的启动行为,并分析飞航影响因子,提出了飞航启动模型等。
二、大气静电理论
大气静电理论的基本观点是:广泛存在的大气电势梯度能提供足够的静电力使得蜘蛛飞航。该理论认为大气电场在蜘蛛起飞中发挥着关键作用。Morley和Robert统计了在两个大气电势梯度下两种预飞航行为的差异,并发现电场的有无可以引起飞航蜘蛛向上或向下的运动。
3、飞航蜘蛛有哪些?
从种类来说,目前已记录具有飞航行为的蜘蛛有27个科,其中包括漏斗蛛科、球蛛科、皿蛛科、狼蛛科、蟹蛛科、猫蛛科等。有些研究明确记录了具体飞航种类,如狼蛛科的Pardosa ramulosa、P.tuoba和园蛛科的斑络新妇(Nephila pilipes)。
从年龄与个头来说,大多数飞航蜘蛛为幼体,长度小于3mm,重量在0.2~2mg之间。但也有研究发现,较大个体同样能进行飞航,如隆头蛛科和蟹蛛科。
4、蜘蛛飞航的未解之谜
飞航是主动行为还是被动行为?同种蜘蛛是否都采用同一种预飞航方式?两种预飞航方式是否会对后续飞航过程产生不同的影响?若飞航机制用空气动力理论来解释,那重量超出基于空气对流的界限的大体型蜘蛛是如何“飞”起来的?若用大气静电理论来解释,那带同种电荷的蛛丝为何呈二维的三角形或扇形分布,而不是均匀的圆锥形分布?这些问题都还有待进一步研究。
----------
在室内发现了一只八脚朝天,仰面飞行的小蜘蛛,蜘蛛大小约一毫米多。八只脚在飞行时不停的挠动。
我用手在蜘蛛上方划过并无蛛丝悬吊,某个瞬间似乎看到蜘蛛身上似乎连着一根4-5厘米长的极细的蛛丝。此蜘蛛小,蛛丝比普通蛛丝更细,大多数时间即使细细看也看不到蛛丝。
蛛丝与蜘蛛身体呈水平状态。
想到以前有一篇『飞翔的蜘蛛』,记得那篇文章写的好像不是真正的蜘蛛飞翔。那不停挠动的爪子,还有水平拖在身后的蛛丝,让我感到不太像依靠空气动力,脑子里立刻就出现了“反重力”,就有搜索了一下,找到了以上这篇文章。
蜘蛛的飞行是依靠空气动力,还是静电,或是凡重力。还真不好说。
故事365站长2024-9-3
会飞的蜘蛛
手机用户点击浏览器底部 ≡ ↗ 或右上角 ┅ 等按钮,收藏或分享到朋友圈
微信扫一扫,订阅「故事365」



赞 订阅